Stellantis Ajukan Paten Konsep Roda Kemudi Terintegrasi
Stellantis mengajukan desain paten roda kemudi terintefrasi yang memungkinkan mengemudi tak perlu menggunakan kak untuk gas dan rem.
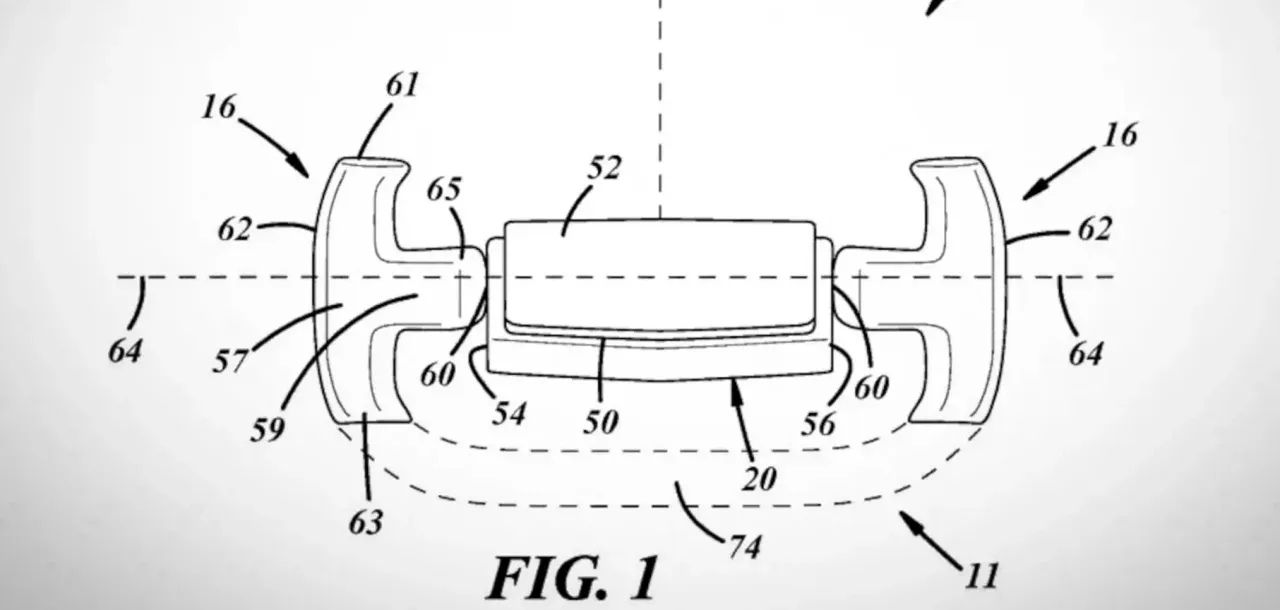
www.SportCorner.id - Stellantis mengajukan sebuah paten untuk jenis roda kemudi berbentuk yoke yang menyatukan fungsi kemudi, throttle, dan pengereman sehingga tidak lagi memerlukan peran kaki untuk mengendalikan laju kendaraan.
Konsep kemudi baru ini tinggal diputar ke kiri atau ke kanan untuk belok, didorong ke depan untuk mempercepat, ditarik ke belakang untuk mengerem. Dengan kata lain,tidak perlu kontrol kaki.
Jika ditelaah lebih jauh, konsep ini bekerja dengan baik di ruang tiga dimensi seperti saat menerbangkan pesawat. Dorong untuk menukik, tarik untuk naik, belok untuk miring, tetapi Anda masih menggunakan pedal untuk mengontrol gerakan yaw/berbelok arah.
Baca juga: Aliansi Nissan Fokus ke EV, Aliansi Toyota Tetap Fokus di ICE
Secara teoritis, konsep ini dapat menjadi kontrol simulasi balapan yang hebat di mana pengemudi sama sekali tidak terpengaruh oleh gaya G dunia nyata pada saat berbelok, menginjak gas, dan mengerem.
Pada kendaraan darat, gaya inersia dapat menjadi masalah nyata dengan cara 'tarik' untuk memperlambat dan 'dorong' untuk mempercepat, begitu pula sebaliknya..
Contohnya, dengan kemudi jenis ini Anda bertemu 'polisi tidur' yang membuat tangan Anda otomatis terdorong ke depan saat roda depan menghantam gundukan dan membuat mobil Anda melaju di atas 12 km/jam, alih-alih melaju pada kecepatan 5 km/jam Sesuai rambu tanda peringatan,